An Education and Research Platform for a Fleet of Autonomous Maritime Vehicles
More InformationDuckiepond is an education and research platform of a fleet of autonomous maritime vehicles, and is an offical branch of the Duckietown Foundation. The developments of Duckiepond include 1) the hardware Duckieboat, course materials, . The Duckiepond platform is built upon the Duckietown and AI Driving Olympics platform: Duckieboats rely only on one monocular camera, IMU, and GPS, and perform all ML processing using onboard embedded computers. It supports commonly used middleware (ROS and MOOS-IvP) and containerize software packages in Docker, making it easy to deploy. The powerful learning-based together with classic methods enable important maritime missions: track and trail, navigation, and coordinate among Duckieboats to avoid collisions. The Duckieboat has been operating in a man-made lake, reservoir, river, and seashore environments. The platform puts together the established materials of the Duckietown autonomy education, which has been adopted by universities globally since 2016, and the newly developed materials for maritime missions. All hardware and software materials are openly available, and we wish that the communities across related domains will adopt the platform for education and research.
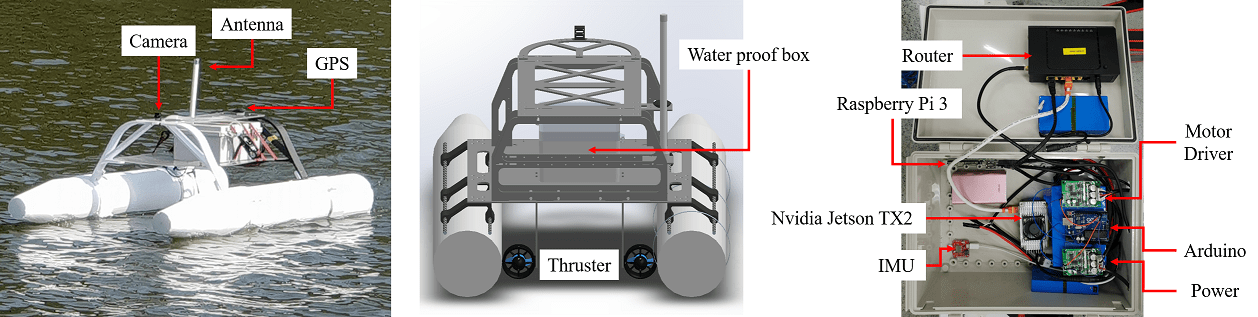
"Duckieboats" are autonomous surface vehicles with the flexibility, capability, machine learning compatibility and objectives of affordability. The Duckieboat system is working on Linux with Ubuntu 16.04 and ROS Kinetic. Based on the underlying system, append PyTorch, MOOS-IvP, NCS SDK to achieve more capability. For the unified and cross-platform needs, we construct the system in Docker container including all software above, dependent libraries and machine learning tools. The structure of Duckieboat is build up with 3D printed materials and layser cut boat and dimensions are 1.5 x 0.75 x 0.6 m. With a weight in air of 20 kg and can carry 10 kg. The system time of autonomy approximately four hours and the power is supply by a 24 voltage Li-battery.
Hardware Design is available on Google Drive links:
Prerequisite: Duckietown
A. Setup-duckietop
B. Setup-duckiebot
C. Software-setup
D. Wheel-calibration
E. Camera-calibration
F. Lane-Following
Duckiepond Material
Note: This tutorial assumes that the reader is familiar with Robot Operating System(ROS), python and Linux CLI. If not, we suggest you check out Duckietown.
A. Build a duckieboat
B. Software setup
C. Joystick control
Advance material
21. Imitation Learning
21. Single Shot MultiBox Detector
23. Introduction to Reinforcement Learning

Dr. Hsueh-Cheng 'Nick' Wang, Advisor

Ni-Ching Lin

Yu-Chieh Hsiao

Yi-Wei Huang

Tzu-Kuan Chuang

Pin-Wei Chen

Jui-Te Huang

Chao-Chun Hsu

Dr. Chi-Fang Chen, Advisor

Ching-Tang Hung
If you are interested, please visit our ARG-NCTU website or contact us with following information.
(EE622)1001 University Road, Hsinchu,
Taiwan 30010, ROC
Pin-Wei Chen
ccpwearth@gmail.com